Santiago Alejandro Moreno Cubillos
Temas:
-Solucion de ecuaciones;Metodo de gauss jordan
-Cofactores 3x3
-Identidades Trigonometricas
Colegio:Leon Magno
Profesor:Luis Armero
Solucion de Ecuaciones por el metodo de gauss jordan:
En matematicas, la eliminación de Gauss-Jordan, llamada así debido a, carl gauss y Wilhem jordan, es un algoritmo del algebra lineal
para determinar las soluciones de un sistema de ecuaciones lineales,
encontrar matrices e inversas. Un sistema de ecuaciones se resuelve por
el método de Gauss cuando se obtienen sus soluciones mediante la
reducción del sistema dado a otro equivalente en el que cada ecuacion tiene una incógnita menos que la anterior. El método de Gauss
transforma la matriz de coeficientes en una matriz triangular superior.
El método de Gauss-Jordan continúa el proceso de transformación hasta
obtener una matriz diagonal.

Pasos para realizar ecuaciones:
Cofactores 3x3
Dada una matriz cuadrada A, su matriz de adjuntos o matriz de cofactores cof(A) es la resultante de sustituir cada término de A por el cofactor de A. El término matriz adjunta adj(A) suele crear confusión, ya que en muchos tratados clásicos sobrealgebra lineal corresponde a la matriz de cofactores traspuesta, sin embargo, en otros textos, se corresponde a la matriz de cofactores, puesto que llaman de la misma manera adjunto al cofactor y de ahí que sea adjunta Aparte, también se utiliza el símbolo indistintamnte a cof para el cálculo en los elementos de una matriz, haciendo, si cabe, la confusión más amplia.
Matrices 3x3



- Ir a la columna no cero extrema izquierda
- Si la primera fila tiene un cero en esta columna, intercambiarlo con otra que no lo tenga.
- Luego, obtener ceros debajo de este elemento delantero, sumando múltiplos adecuados del renglón superior a los renglones debajo de él.
- Cubrir el renglón superior y repetir el proceso anterior con la submatriz restante. Repetir con el resto de los renglones (en este punto la matriz se encuentra en forma escalonada).
- Comenzando con el último renglón no cero, avanzar hacia arriba: para cada renglón obtener un 1 delantero e introducir ceros arriba de éste sumando múltiplos correspondientes a los renglones correspondientes.
Cofactores 3x3
Dada una matriz cuadrada A, su matriz de adjuntos o matriz de cofactores cof(A) es la resultante de sustituir cada término de A por el cofactor de A. El término matriz adjunta adj(A) suele crear confusión, ya que en muchos tratados clásicos sobrealgebra lineal corresponde a la matriz de cofactores traspuesta, sin embargo, en otros textos, se corresponde a la matriz de cofactores, puesto que llaman de la misma manera adjunto al cofactor y de ahí que sea adjunta Aparte, también se utiliza el símbolo indistintamnte a cof para el cálculo en los elementos de una matriz, haciendo, si cabe, la confusión más amplia.
Matrices 3x3
Dada una matriz de 3 x 3:
Su matriz de cofactores viene dada por:
y por lo tanto la transpuesta de la matriz de cofactores es la matriz Adjunta:
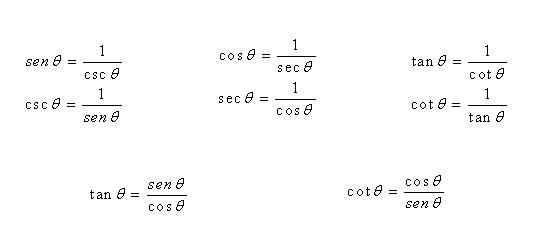
Identidades Trigonometricas
Una identidad trigonométrica es una igualdad entre expresiones que contienenfunciones trigonometricas y es válida para todos los valores del ángulo en los que están definidas las funciones (y las operaciones aritméticas involucradas).
Una identidad trigonométrica es una igualdad entre expresiones que contienenfunciones trigonometricas y es válida para todos los valores del ángulo en los que están definidas las funciones (y las operaciones aritméticas involucradas).
Comentarios
Publicar un comentario